最小生成树的算法设计,以及实现的Prim和Kruskal算法。最小树形图的朱刘算法。
摘要
分析一下MST普适算法,加一些证明,帮助理解。
最小生成树
一个有V个顶点的无向连通图,其最小生成树是包含原图全部V个顶点,并且保持V个节点连通的,具有V-1条权值之和最小边的连通子图。(MST)
算法设计
贪心策略在求解MST时是可行的:要寻找最小生成树T,对于任意顶点u而言,在其相邻边的集合中,假设权值最小边是(u,v),而T中不包含(u,v),因此一定有另一条相邻边(u,v’)∈T且其权值大于(u,v),这意味着T不满足最小生成树的性质。根据定义,最小生成树只含有V-1条边,因此关键在于如何寻找不破坏性质而对整体而言权值相对更小的边。最小生成树包含图中所有顶点,因此从任一顶点开始搜索都可以获取到满足的MST,假设从顶点s开始,对于s紧邻的所有顶点遍历过后,一定会有一个顶点v,使得(s,v)的权值是所有s邻边中最小的,根据上面贪心策略的证明,(s,v)∈T。将构造过程中的顶点集合记为A,边集合记为E^s ,此时A = {s,v},E^s = {(s,v)},E^s ⊆T。
定义一些概念:无向图G =(V,E)的一个割(A,V - A)是对顶点集V的一个划分,当一条边(u,v)∈E并且其中一个顶点∈A,另一个顶点∈(V - A),称这条边(u,v)通过割(A,V - A)。如果一个边集E’满足其中任一边都不通过某个割,则说这个割不妨害边集E’。如果某一条边的权值是通过一个割的所有边中最小的,则称该边为通过这个割的一条轻边(可能会有多条轻边)。
接下来对E^s 继续扩充。显然,再向E^s 中加入任何直接或间接连接s,v的边都是无用的,称这些边为对E^s 不安全的边。可以添加的安全边必须满足一定条件,下面寻找这个条件。上一句已经表明:安全边首先必须通过割(A,V - A),否则是不安全的。根据贪心策略,应当在通过割的边中寻找最小边,因此定义里的轻边是符合这两个前提的。下面证明,通过割(A,V - A)的轻边是对E^s 安全的(显然,割(A,V - A)是不妨害E^s 的):
- 假设T是包含E^s 的一棵最小生成树,并且T不包含轻边(u,v)(否则证明完成)。因为T不包含(u,v),所以向T中加入(u,v)将构成回路。因为(u,v)通过割(A,V - A),所以在T中存在另外一条边也通过割,假设这条边是(x,y),因为割不妨害E^s ,所以(x,y)不属于E^s 。在T中,除去任意一条边都会导致生成树变成两个子图,如果去掉(x,y),T将被分成两个子图(u到v的唯一通路断开),此时加入边(u,v)将使得T重新被连接,新的T’ = T - {(x,y)}∪{(u,v)}。接下来可以证明T’是一颗最小生成树。记ω(a,b)为边(a,b)的权值,因为(u,v)是轻边,所以ω(u,v)≤ ω(x,y),所以ω(T’)≤ ω(T)。又已知T是最小生成树,所以ω(T)≤ ω(T’)。因此T’是最小生成树。
- 下面证明(u,v)是E^s 的一条安全边。因为E^s ⊆T而(x,y)∉E^s ,故E^s ⊆T’。故E^s ∪{(u,v)}⊆T’。因为T’是最小生成树,所以(u,v)对E^s 是安全的。
- 整个流程。根据上面的证明,已经确定了加边的过程和依据。
1
2
3
4
5
6
7Get-MST( G, ω ){
E^s ← ∅
while E^s hasn't formed a MST
find a safe edge (u, v) for E^s
E^s ← E^s ∪{(u,v)}
return E^s
}
Prim算法
Prim算法又称为DJP算法,分别于1930年由捷克数学家沃伊捷赫·亚尔尼克(Vojtěch Jarník),1957年由美国计算机科学家罗伯特·普里姆(Robert C. Prim),1959年由艾兹格·迪科斯彻多次发现。下面的链接是Wiki上关于普里姆算法的描述。
算法描述
- 输入一个加权连通图G =(V,E)。
- 初始化一个顶点集Vn = {s},s是集合V中的任一节点作为起点,边集En = {}为空。
- 重复下列操作直到V = Vn:
- 从集合E中选取(u,v),满足以下条件:u属于Vn且v不属于Vn,并且这样的(u,v)在E中权值最小,如果存在多条相同权值的边,任选其一。
- 将v加入Vn中,将边(u,v)边加入En中。
- En为最小生成树包含的V-1条边的集合。
时间复杂度分析
- 邻接矩阵表示:采用邻接矩阵存储,每次寻找到权值最短的边需要O(V),一共需要O(V^2)。
- 采用邻接表+二叉堆,O((V+E)logV)。因为对维护边的二叉堆每次操作需要logV,需要调整边E次,向En加边后删除最小元V次。
- 采用斐波那契堆+邻接表为O(E+VlogV),在连通图足够稠密时(E = Ω(VlogV)时),可以显著提高运行速度。
代码实现(邻接表+堆优化)
1 | #include <stdio.h> |
代码给出最小生成树的权值和。如果需要记录E^s ,要额外建立一个数组e,在每次修改dist的时候维护e,或者在edge结构中加入一个flag域区分此边是否被选中,每次维护dist都要更新对应边的flag域。
运行示例:
Kruskal算法
可以看出要优化Prim需要比较高的代码复杂度。Kruskal算法从E中选取V-1条边,其贪心策略简单并且易实现,完全基于上面算法设计的描述,只需要对边进行操作,并用并查集判断点之间的相交关系。采用快速排序的Kruskal时间复杂度为O(ElogE),适合稀疏图。如果不采用快速排序,改用优先队列维护Kruskal效率会更高(如果边比较多,会有很多无用边无需排序,只要取出优先队列前列的需要的MST边)。与Prim的区别在于:Kruskal中,E^s 是一个森林,加入集合E^s 的安全边总是连接G中的两个不同连通分支的最小权边;而在Prim中,E^s 一直只有一棵树,每次向E^s 中添加的安全边连接E^s 和一个不在树中的顶点的最小权边。
算法描述
- 对于无向连通图G =(V,E),先构造一个只含V个顶点,边集为空的子图G’,若将G’中各个顶点看成是各棵树上的根结点,则它是一个含有V棵树的一个森林。从E中选取一条权值最小的边,若该条边的两个顶点分属不同的树,则将其加入G’,即将这两个顶点分别所在的两棵树合成一棵树;反之若该条边的两个顶点已落在同一棵树上,则跳过,取下一条权值最小的边再尝试。直至森林中只有一棵树,即G’中含有V-1条边。
代码实现(快速排序+并查集,边集数组存储)
1 | #include <stdio.h> |
最小树形图
上面的最小生成树针对无向加权连通图,在有向带权图中,指定一个特定的顶点root,求出一棵以root为根的有向生成树T,使得T中所有边的总权值最小,该问题称为最小树形图。以下均不考虑图中不存在最小树形图的情况(判断是否存在只要对图进行一次遍历即可确定)。
朱刘算法
朱刘算法是最小树形图的第一个算法,在1965年由朱永津和刘振宏提出,复杂度为O(VE)。
算法描述
- 对固定根root进行一遍DFS判断是否存在最小树形图。
- 为除了root之外的每个顶点选定一条最小的入边(用pre[u]记录顶点u最小入边的起点)。
- 判断2中构造的入边集合是否存在有向环,如果不存在,那么这个集合就是该图的最小树形图。
- 如果3中判断出现有向环,则消环缩点。设(u, v, w)表示从u到v的权为w的边。假设3中判断出的有向环缩为新顶点new,若u位于环上,并设环中指向u的边权是ω[u]。那么对于每条从u出发的边(u, v, w),在新图中连接(new, v, w),对于每条进入u的边(in, u, w),在新图中建立边(in, new, w-ω[u])。新图里最小树形图的权加上旧图中被收缩的环的权和,就是原图中最小树形图的权值。重复2,3,4。
- 3中判断无有向环,返回权值。
- 其他:
- 如果没有指定固定根,可以增加一个虚拟根,并且为其增加V条边指向每个顶点,权值都为原图所有边权值之和加一,转化为固定根求解。
- 朱流算法只能求解最小总权值,无法求出路径(缩点后原顶点编号改变)。
代码描述(边集数组)
1 | #include <stdio.h> |
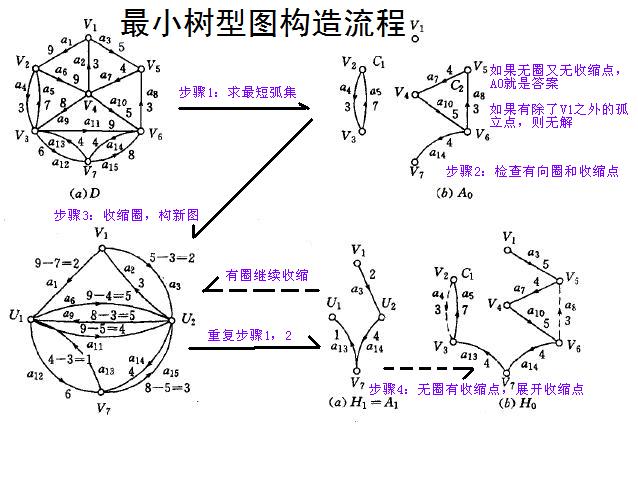
流程展示
- 盗了一张图,演示最小树形图的构造流程,并以此为样例试运行上面的代码。
- 运行结果如下:
1986年Tarjan等提出的复杂度更好的算法
1986年, Gabow, Galil, Spencer和Tarjan提出了一个复杂度更好的实现,其时间复杂度为O(E+VlogV)。相关资料比较少,以后会把这里补上。
原创作品,允许转载,转载时无需告知,但请务必以超链接形式标明文章原始出处(https://forec.github.io/2015/09/23/Graph-Algorithms4/) 、作者信息(Forec)和本声明。